Controlador Dual Brushed Antweight Budget Ant DESC
$51.86
$96.46
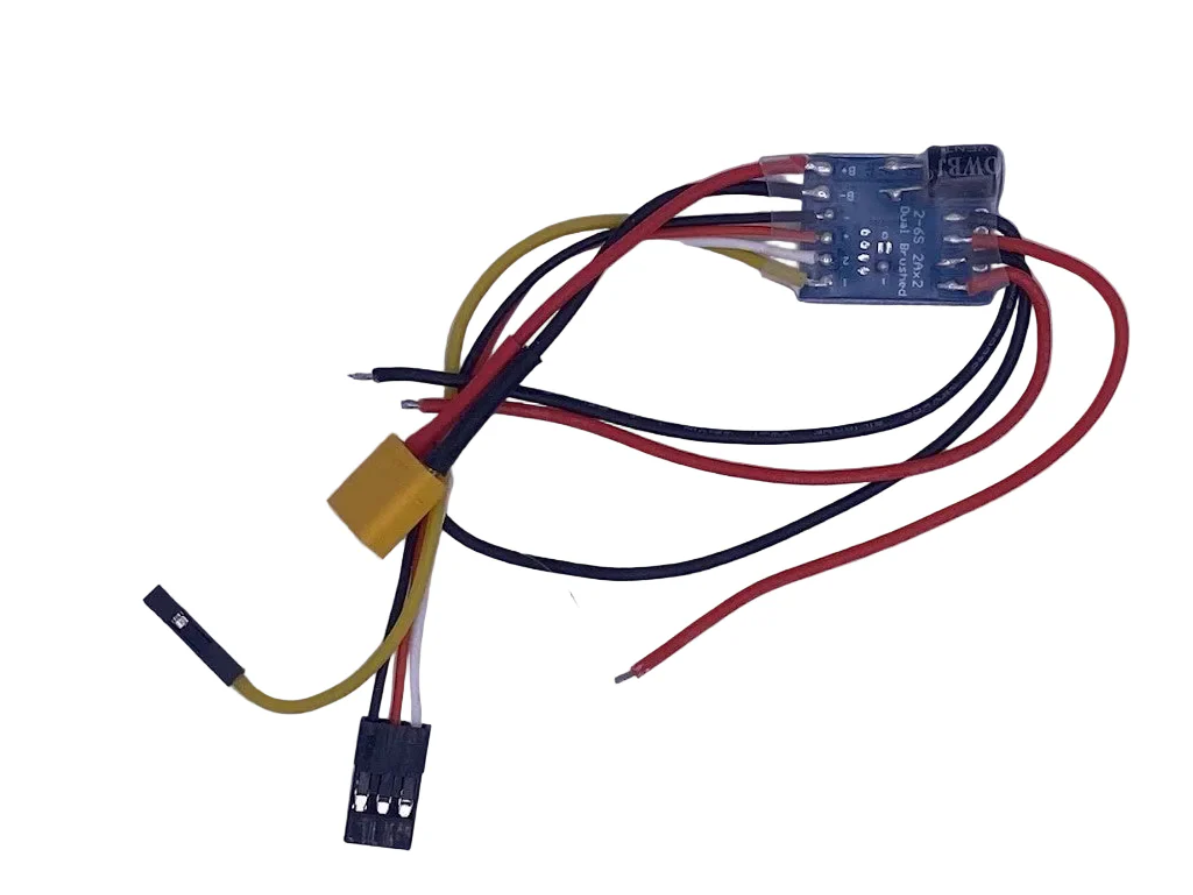
Controlador Dual Brushed Antweight Budget Ant DESCEl Budget Ant DESC controlador dual brushed antweight es un ESC diseñado específicamente para sistemas de tracción en robots de combate de 1 lb (Antweight), ofreciendo una solución económica y robusta para controlar dos motores DC con escobillas desde un solo módulo. Este controlador se basa en una plataforma dual optimizada para proporcionar una experiencia de conducción estable, con funciones integradas que simplifican el diseño electrónico del robot.Se trata de un ESC configurado para ofrecer un manejo intuitivo de robots diferenciales, integrando mezcla de canales, frenado central y conectores pre-soldados, lo que reduce el tiempo de instalación y minimiza errores de cableado.Su enfoque principal es ofrecer una opción accesible sin sacrificar las funciones esenciales que requieren los robots de competencia, convirtiéndose en una alternativa atractiva tanto para constructores principiantes como para equipos experimentados.Budget Ant DESC características técnicasTipo: ESC dual para motores brushedAplicación: tracción de robots AntweightVoltaje recomendado: 2S–4S LiPoVoltaje máximo: hasta 6S (no recomendado)Corriente continua: 2 A por canalDimensiones aproximadas: 24 × 18 × 5 mmPeso aproximado: 7 g con cablesBEC integrado: 5 V 1.5 AMezcla integrada (deshabilitada por defecto)Frenado centralFailsafe que detiene motores ante pérdida de señalEstas especificaciones muestran su enfoque en sistemas ligeros donde la eficiencia energética y el tamaño compacto son factores determinantes.Budget Ant DESC funcionamiento y arquitecturaEl Budget Ant DESC controlador dual brushed antweight combina dos controladores de motor en una sola placa, permitiendo manejar la tracción izquierda y derecha del robot de forma independiente o mezclada.El sistema de mezcla puede activarse mediante un jumper físico, lo que permite cambiar entre control tipo tanque y control tipo arcade según la configuración del transmisor.El frenado central mejora el control en maniobras al detener los motores cuando el stick regresa a neutro, mientras que la función failsafe apaga los motores si se pierde la señal del receptor, aumentando la seguridad operativa.El módulo incluye conectores XT30 para alimentación y salidas pre-cableadas, facilitando la integración en el robot y reduciendo el tiempo de ensamblaje.Beneficios del Budget Ant DESCSolución económica y confiable para robots AntweightControl de dos motores en un solo móduloMezcla integrada para conducción intuitivaInstalación rápida gracias a conectores pre-soldadosBEC integrado para alimentar receptor y electrónicaDiseño ligero ideal para robots pequeñosEste conjunto de ventajas lo posiciona como una de las opciones más prácticas para sistemas de tracción compactos donde el costo y la simplicidad son prioridades.Aplicaciones del Budget Ant DESCEl Budget Ant DESC controlador dual brushed antweight se emplea principalmente en:Robots de combate de 1 lbPlataformas móviles compactasPrototipos de robótica educativaRobots experimentales de tracción diferencialProyectos de investigación en robótica ligeraEn el ámbito competitivo, este tipo de controlador permite construir robots funcionales con un sistema eléctrico sencillo y confiable, facilitando la iteración rápida del diseño.Ventajas frente a ESC individualesUtilizar un controlador dual como el Budget Ant DESC reduce el peso total y el cableado en comparación con usar dos ESC independientes. Además, la mezcla integrada elimina la necesidad de módulos externos, simplificando la arquitectura electrónica.La presencia de BEC integrado permite alimentar el receptor directamente desde el ESC, reduciendo componentes adicionales y mejorando la eficiencia del sistema.Consideraciones técnicasEl controlador no incluye limitación activa de corriente, por lo que es importante evitar el bloqueo prolongado de los motores, especialmente en configuraciones de alto voltaje, ya que esto puede provocar sobrecalentamiento y daños permanentes en el sistema.Esto resalta la importancia de un diseño mecánico adecuado y de estrategias de control que eviten condiciones de carga extrema.